AP10/Pràctica1.-Rampa acceleració
Introducció: en aquesta pràctica es donaran a conèixer els conceptes relacionats amb control de la velocitat d'un motor de corrent continu.
El control de la velocitat que es planteja consisteix en donar alimentació en forma d'impulsos al motor cada cert temps. Com més durada tingui aquest impuls, el motor rebrà voltatge durant més estona i anirà més depresa. I al rebés, quan menys durada tingui l'impuls, menys depresa anirà el motor, perquè rebrà voltatge durant menys temps.
El PICAXE-20M disposa de la instrucció:
pulsout pin, time
, que treu impulsos per la sortida definida per pin. Time representa la durada dels pulsos en base 10us (0-65535).
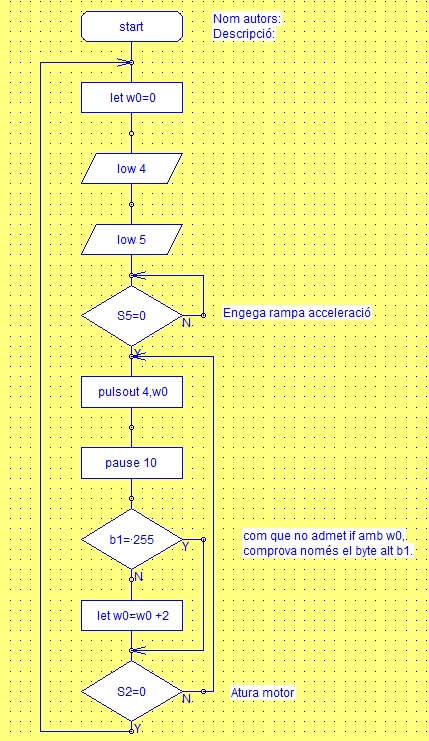
Si per fer anar el motor del canal A del driver de motors L293D, cal posar la sortida4 a 1 lògic i la sortida5 a 0 lògic, per regular la velocitat, cal posar les dues sortides a 0 lògic i treure impulsos per la sortida 4. Com més durin aquests impulsos més ràpid girarà el motor.
Enunciat: es tracta de fer un programa en DdF que faci una rampa d'acceleració del motor del canal A del L293D. La rampa d'aceleració ha de començar quan es polsi S5 i s'ha d'aturar en qualsevol moment quan es polsi S2.
Millora: modifiqueu el programa perquè la rampa d'acceleració sigui més ràpìda.
Simulació: el funcionament del motor no es pot simular per ordinador. Només es pot simular l'execució del programa.
Transferir al picaxe: transferiu el programa al PICAXE-20M i comproveu el funcionament.
Desar: Deseu el vostre programa amb el nom de AP10pràctica1.
Lliurament: Entregueu l'arxiu AP10pràctica1.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat corresponent d'Activitats de Programació10.
El control de la velocitat que es planteja consisteix en donar alimentació en forma d'impulsos al motor cada cert temps. Com més durada tingui aquest impuls, el motor rebrà voltatge durant més estona i anirà més depresa. I al rebés, quan menys durada tingui l'impuls, menys depresa anirà el motor, perquè rebrà voltatge durant menys temps.
El PICAXE-20M disposa de la instrucció:
pulsout pin, time
, que treu impulsos per la sortida definida per pin. Time representa la durada dels pulsos en base 10us (0-65535).
Si per fer anar el motor del canal A del driver de motors L293D, cal posar la sortida4 a 1 lògic i la sortida5 a 0 lògic, per regular la velocitat, cal posar les dues sortides a 0 lògic i treure impulsos per la sortida 4. Com més durin aquests impulsos més ràpid girarà el motor.
Enunciat: es tracta de fer un programa en DdF que faci una rampa d'acceleració del motor del canal A del L293D. La rampa d'aceleració ha de començar quan es polsi S5 i s'ha d'aturar en qualsevol moment quan es polsi S2.
Millora: modifiqueu el programa perquè la rampa d'acceleració sigui més ràpìda.
Simulació: el funcionament del motor no es pot simular per ordinador. Només es pot simular l'execució del programa.
Transferir al picaxe: transferiu el programa al PICAXE-20M i comproveu el funcionament.
Desar: Deseu el vostre programa amb el nom de AP10pràctica1.
Lliurament: Entregueu l'arxiu AP10pràctica1.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat corresponent d'Activitats de Programació10.
