AP9/Pràctica1.-Principi de funcionament del driver de motors L293D.
Introducció: en aquesta pràctica es donaran a conèixer els conceptes relacionats amb control d'un motor de corrent continu amb el driver de motors L293D.
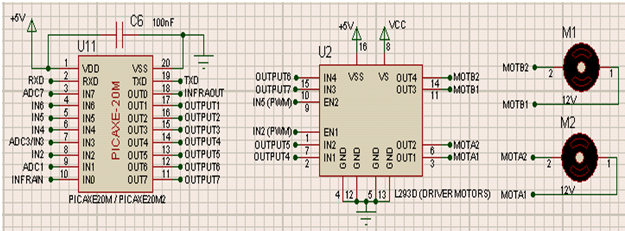
Les sortides del PICAXE-20M no alimenten directament els motors, ja que no són capaces de donar prou corrent de sortida. Per solucionar aquesta mancança la placa incorpora el driver de motors L293D.
Aquest driver consta de dos blocs. El primer bloc (A) disposa de dues entrades destinades a la selecció del sentit de gir IN1 i IN2, i una entrada d’habilitació EN1.
Les sortides del driver (OUT1 i OUT2) es connecten directament al motor (MOTA1 i MOTA2) i li subministren la potència necessària per al seu correcte funcionament.
En funció de les combinacions de les entrades de control, s’obté una tensió de sortida cap el motor d’una o altra polaritat, provocant el gir del motor en un o altre sentit.
Les sortides del PICAXE-20M no alimenten directament els motors, ja que no són capaces de donar prou corrent de sortida. Per solucionar aquesta mancança la placa incorpora el driver de motors L293D.
Aquest driver consta de dos blocs. El primer bloc (A) disposa de dues entrades destinades a la selecció del sentit de gir IN1 i IN2, i una entrada d’habilitació EN1.
Les sortides del driver (OUT1 i OUT2) es connecten directament al motor (MOTA1 i MOTA2) i li subministren la potència necessària per al seu correcte funcionament.
En funció de les combinacions de les entrades de control, s’obté una tensió de sortida cap el motor d’una o altra polaritat, provocant el gir del motor en un o altre sentit.
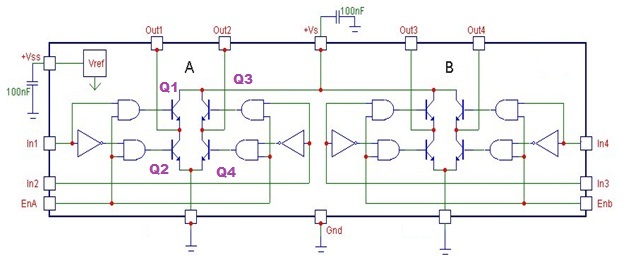
Cada driver incorpora 4 transistors de manera que, per conduir en un sentit condueixen dos d’ells (Q1 i Q4 respectivament), i per fer-lo funcionar en sentit contrari, condueixen els altres dos (Q3 y Q2 ).
Per controlar el motor A s’utilitzen els pins: ENA, IN2, IN1.
Per controlar el motor B s’utilitzen els pins: ENB, IN4, IN3.
En el circuit de control s’han connectat les dos entrades d’habilitació EN1 i EN2 a IN2 i IN5, que són entrades del PICAXE-20M i per tant estan a nivell alt. Cal recordar que quan EN1 i EN2 reben un 1 queden habilitades.
Aquesta prestació ja la té el PICAXE-20X2 però només a la sortida IN5 (C.5). Per tant només permet la regulació de velocitat del motor del canal B. Veure la pràctica 2 de les activitats de programació10.
Quan s’utilitzi el PICAXE-20M2, tant IN2 com IN5 es podran configurar com a sortides amb la funció de modulació per polsos en segon pla i permetran el control de velocitat dels motors de forma molt senzilla
Per controlar el motor A s’utilitzen els pins: ENA, IN2, IN1.
Per controlar el motor B s’utilitzen els pins: ENB, IN4, IN3.
En el circuit de control s’han connectat les dos entrades d’habilitació EN1 i EN2 a IN2 i IN5, que són entrades del PICAXE-20M i per tant estan a nivell alt. Cal recordar que quan EN1 i EN2 reben un 1 queden habilitades.
Aquesta prestació ja la té el PICAXE-20X2 però només a la sortida IN5 (C.5). Per tant només permet la regulació de velocitat del motor del canal B. Veure la pràctica 2 de les activitats de programació10.
Quan s’utilitzi el PICAXE-20M2, tant IN2 com IN5 es podran configurar com a sortides amb la funció de modulació per polsos en segon pla i permetran el control de velocitat dels motors de forma molt senzilla
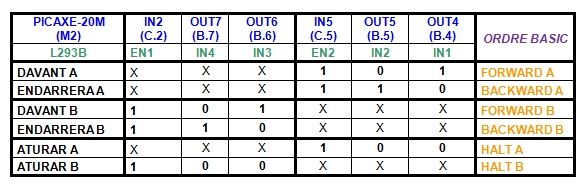
A continuació es mostra una taula que reflexa el valor que ha de tenir cada sortida en funció de l’estat de funcionament del motor que es desitja.
A la columna “ORDRE BASIC” es mostra l’ordre en llenguatge BASIC que s’ha d’utilitzar dins del programa per tal de controlar els motors. Cal recordar que aquestes ordres no funcionen amb el PICAXE-20M, però si amb els 20X2 i 20M2. Aleshores amb el model PICAXE-20M, el control dels motors s’ha de fer amb high i low de les sortides corresponents segons la taula adjunta, o si es programa en DdF, amb les icones de movement del menú de blocs d'instruccions.
A la columna “ORDRE BASIC” es mostra l’ordre en llenguatge BASIC que s’ha d’utilitzar dins del programa per tal de controlar els motors. Cal recordar que aquestes ordres no funcionen amb el PICAXE-20M, però si amb els 20X2 i 20M2. Aleshores amb el model PICAXE-20M, el control dels motors s’ha de fer amb high i low de les sortides corresponents segons la taula adjunta, o si es programa en DdF, amb les icones de movement del menú de blocs d'instruccions.
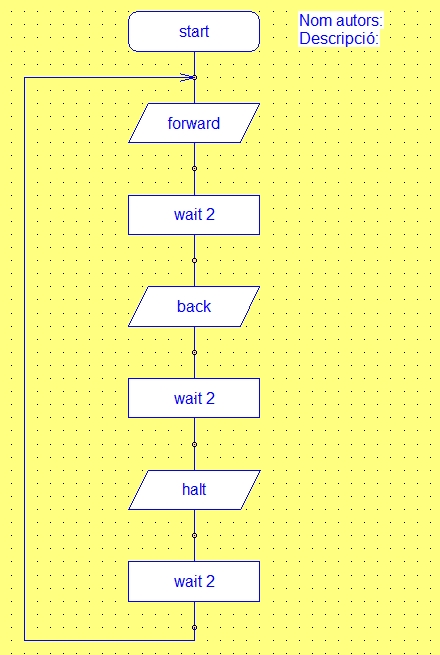
Enunciat: es tracta de fer un programa en DdF que faci anar els dos motors endavant durant 2s, endarrera 2s i aturats 2s. Copieu el programa d'exemple i proveu-ne el funcionament.
Millora: modifiqueu el programa perquè el motor abans de canviar el sentit de gir sempre s'aturi 1,5s.
Simulació: el funcionament del motor no es pot simular per ordinador. Només es pot simular la combinació de sortides que s'activaran per fer anar el motor cc en un i altre sentit.
Transferir al picaxe: transferiu el programa al PICAXE-20M i comproveu el funcionament.
Desar: Deseu el vostre programa amb el nom de AP9pràctica1.
Lliurament: Entregueu l'arxiu AP9pràctica1.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat corresponent d'Activitats de Programació9.
Millora: modifiqueu el programa perquè el motor abans de canviar el sentit de gir sempre s'aturi 1,5s.
Simulació: el funcionament del motor no es pot simular per ordinador. Només es pot simular la combinació de sortides que s'activaran per fer anar el motor cc en un i altre sentit.
Transferir al picaxe: transferiu el programa al PICAXE-20M i comproveu el funcionament.
Desar: Deseu el vostre programa amb el nom de AP9pràctica1.
Lliurament: Entregueu l'arxiu AP9pràctica1.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat corresponent d'Activitats de Programació9.
Per saber-ne més.
Vídeo de Edu3.cat sobre el principi de funcionament dels motors elèctrics de corrent continu i altern: http://www.edu3.cat/Edu3tv/Fitxa?p_id=17012
