AP8/Pràctica3.-Control de velocitat del servo
Introducció: en aquesta pràctica es donaran a conèixer els conceptes relacionats amb el control de velocitat d'un servomotor.
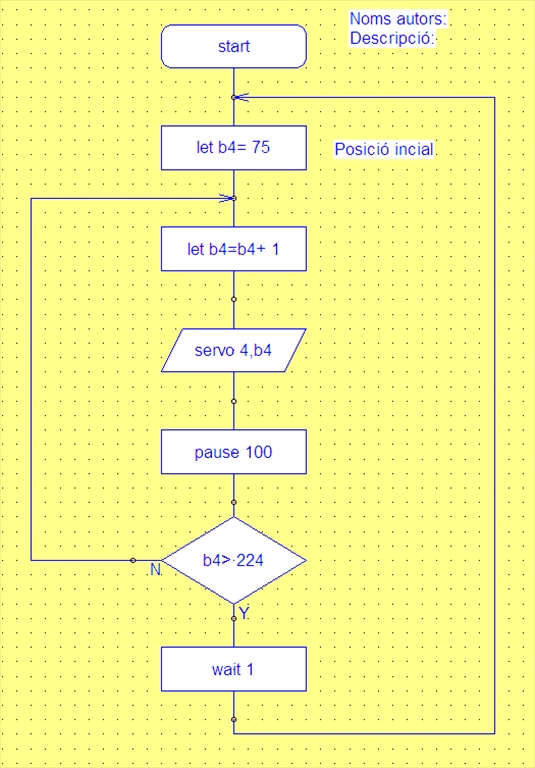
El sistema de treballar amb increments, a partir d'un valor inicial, té l'avantatge de poder modificar la posició del servo més ràpidament o més lentament segons el valor dels increments i segons el temps en que es vagin repetint. Per tant, aquest procediment permet controlar la velocitat de gir del servomotor.
Enunciat: es tracta de fer un programa en DdF que faci un escombrat de totes les posicions possibles d'un servo a partir d'una posició inicial de 0º fins als 180º amb increments. Copieu el programa i observeu el funcionament.
Millora: modifiqueu el programa perquè el servo giri més ràpidament. Podeu fer-ho modificant els increments o modificant la pausa entre cada increment. Proveu-los tot dos i indiqueu quin dels dos sistemes fa que la velocitat varïi de forma més contínua, és a dir, sense tantes batzegades.
Com a millora avançada, es proposa que la regulació de velocitat sigui en els dos sentits.
Simulació: el posicionament del servomotor no es pot simular per ordinador, però sí el recorregut del programa i els valors que va prenent el registre b4.
Transferir al picaxe: transferiu el programa al PICAXE-20M i comproveu el funcionament.
Desar: Deseu el vostre programa amb el nom de AP8pràctica3.
Lliurament: Entregueu l'arxiu AP8pràctica3.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat corresponent d'Activitats de Programació8.
El sistema de treballar amb increments, a partir d'un valor inicial, té l'avantatge de poder modificar la posició del servo més ràpidament o més lentament segons el valor dels increments i segons el temps en que es vagin repetint. Per tant, aquest procediment permet controlar la velocitat de gir del servomotor.
Enunciat: es tracta de fer un programa en DdF que faci un escombrat de totes les posicions possibles d'un servo a partir d'una posició inicial de 0º fins als 180º amb increments. Copieu el programa i observeu el funcionament.
Millora: modifiqueu el programa perquè el servo giri més ràpidament. Podeu fer-ho modificant els increments o modificant la pausa entre cada increment. Proveu-los tot dos i indiqueu quin dels dos sistemes fa que la velocitat varïi de forma més contínua, és a dir, sense tantes batzegades.
Com a millora avançada, es proposa que la regulació de velocitat sigui en els dos sentits.
Simulació: el posicionament del servomotor no es pot simular per ordinador, però sí el recorregut del programa i els valors que va prenent el registre b4.
Transferir al picaxe: transferiu el programa al PICAXE-20M i comproveu el funcionament.
Desar: Deseu el vostre programa amb el nom de AP8pràctica3.
Lliurament: Entregueu l'arxiu AP8pràctica3.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat corresponent d'Activitats de Programació8.
