AP6/Pràctica 1.-Lectura sensor digital d'obstacles
Introducció: en aquesta pràctica es donaran a conèixer els conceptes relacionats amb la detecció d'objectes a través de l'entrada analògica que també es pot tractar com a digital ADC3/IN3.
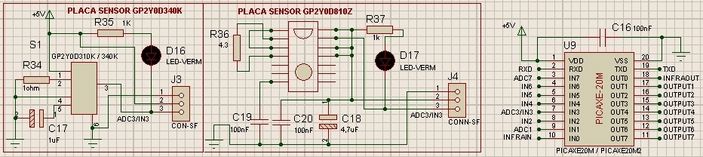
Donat que la placa Imagina incorpora dues petites plaquetes per muntar el sensor de presència d'objectes GP2Y0D810Z i el GP2Y0D340K, s'explicarà el seu funcionament.
Els dos són sensors funcionen per infraroig: emeten llum infraroig a una determinada freqüència i capten part de la llum que ha reflexat l'objecte que tenen al davant. Quan detecten l'objecte, la seva sortida passa d'estar de 5volts a 0volts. Per tant s'activen amb lògica negativa.
La única diferència entre el dos sensors anomenats anteriorment és que el primer detecta fins a 10cm i el segon fins a 40cm. En aquesta distància de detecció influeix molt el color i la brillantor de la superfície de l'objecte. Si la superfície és blanca i brillant augmenta el rang de detecció, i si pel contrari, és mate i negra, es redueix.
Per llegir aquest pin d'entrada digitalment es fa com si fos un polsador: if pin3=0 then ...
Enunciat: es tracta de fer un programa en DdF que vagi comprovant cada 1s, si detecta un objecte per l'entrada IN3 i en cas afirmatiu encengui la sortida 7 (LED vermell). Si no detecta que encengui només la sortida 5 (LED verd). Recordeu que s'activa per 0 lògic.
Simulació: Simuleu-lo i comproveu-ne el funcionament. Ensenyeu-lo al vostre professorat.
Transferir al picaxe (opcional): transferiu el programa al PICAXE-20M i comproveu si el funcionament és el mateix
que el simulat.
Desar: Deseu el vostre programa amb el nom de AP6pràctica1.
Lliurament: Entregueu L'arxiu AP6pràctica1.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat
corresponent d'Activitats de Programació 6.
Donat que la placa Imagina incorpora dues petites plaquetes per muntar el sensor de presència d'objectes GP2Y0D810Z i el GP2Y0D340K, s'explicarà el seu funcionament.
Els dos són sensors funcionen per infraroig: emeten llum infraroig a una determinada freqüència i capten part de la llum que ha reflexat l'objecte que tenen al davant. Quan detecten l'objecte, la seva sortida passa d'estar de 5volts a 0volts. Per tant s'activen amb lògica negativa.
La única diferència entre el dos sensors anomenats anteriorment és que el primer detecta fins a 10cm i el segon fins a 40cm. En aquesta distància de detecció influeix molt el color i la brillantor de la superfície de l'objecte. Si la superfície és blanca i brillant augmenta el rang de detecció, i si pel contrari, és mate i negra, es redueix.
Per llegir aquest pin d'entrada digitalment es fa com si fos un polsador: if pin3=0 then ...
Enunciat: es tracta de fer un programa en DdF que vagi comprovant cada 1s, si detecta un objecte per l'entrada IN3 i en cas afirmatiu encengui la sortida 7 (LED vermell). Si no detecta que encengui només la sortida 5 (LED verd). Recordeu que s'activa per 0 lògic.
Simulació: Simuleu-lo i comproveu-ne el funcionament. Ensenyeu-lo al vostre professorat.
Transferir al picaxe (opcional): transferiu el programa al PICAXE-20M i comproveu si el funcionament és el mateix
que el simulat.
Desar: Deseu el vostre programa amb el nom de AP6pràctica1.
Lliurament: Entregueu L'arxiu AP6pràctica1.cad al curs Moodle ROBOT HUMANOIDE IMAGINA, a l'apartat
corresponent d'Activitats de Programació 6.
